来源:
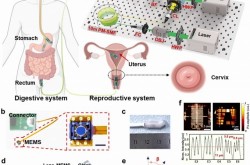
美国加州大学洛杉矶分校的生物工程师设计了一种新型仿生 3D 成像系统,可模仿苍蝇的多视图视觉和蝙蝠的自然声呐感应,从而生成3D 成图像。该系统称之为紧凑光场摄影 (CLIP)系统,主要由模拟苍蝇复眼的相机阵列以及类似回声定位的闪光激光雷达构成 (Nat. Commun., doi: 10.1038/s41467-022-31087- 9)。
CLIP 支持具有深度范围的快速 3D 成像,可破译隐藏在角落周围或障碍物后面的物体的大小和形状。该技术可用于需要高速 3D 成像的各种应用,比如自动驾驶汽车和机器视觉等领域。
传统的成像传感器只能从给定视角捕获场景的 2D 投影,要想获得3D图像,只能沿额外的光轴进行更多测量。蝙蝠可通过回声定位或声呐的形式将周围环境的画面形象化;昆虫的复眼则由数百到数万个单独的视觉单元组成,使其从多条视线看到同一事物成为可能。为了消除存在于3D场景和记录传感器之间的所谓维度差距,研究人员受到在苍蝇和蝙蝠中发现的这两种自然现象的启发,设计出一种高性能3D相机系统。
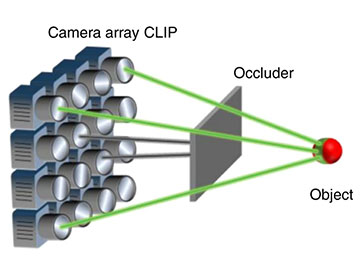
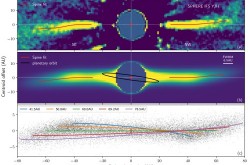
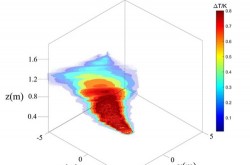
图1 CLIP可以恢复被障碍物遮挡的物体信息,且每个摄像头只记录场景的部分信息
多视角测量可通过类似于苍蝇复眼的阵列相机来增加光的角轴,或者类似于蝙蝠回声定位的光子传播时间来计算距离,但这里使用光波代替了声波。多视图飞行时间测量则结合了以上两种方法,但传统的成像系统产生的数据较大,即使降低空间分辨率,处理起来也比较复杂。除此之外,扫描过程也很耗时。
为了解决上述障碍,研究人员开发了CLIP,它使用任意格式的传感器来记录高维图像,其数据量甚至比常规2D图像的像素数还要小。
CLIP系统包括一个作为超快传感器的条纹相机,用于捕捉3D飞行时间数据,以及一个用于照亮场景的飞秒激光器。条纹相机由七个定制镜头进行空间复用,以模仿相机阵列。首先拍摄场景的低分辨率图像,处理单个摄像头看到的内容,然后在高分辨率3D成像中重建组合场景。

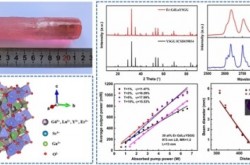
图2 一个2×2网格图案在矩形遮挡后的3D成像
与传统摄影方法中逐个像素获取空间信息不同,CLIP 系统在每个像素测量中以不同的灵敏度模式感知整个场景,并将整个空间测量过程分配到不同的角度。 最后的图像是由分布在不同角度的测量数据通过成熟的光场处理能力计算合成的。
实验验证阶段,研究人员设置了三个不同的场景,从正面看,目标物体好像完全被障碍物挡住。然而CLIP 系统可以成功地恢复被遮挡的物体,并且在三个场景中物体和障碍物之间都有清晰的分离。
团队称,CLIP系统记录的高维信息可以使 3D 相机看穿障碍物,并扩大飞行时间传感器(如激光雷达相机)的成像范围。例如,通过利用光场信息合成一个大的成像孔径,从而发现被汽车立柱挡住的行人,或着跟踪人群中移动的人。